ÖCŲ„╚╦ęčĮø┐╔ęįė├2éĆ╗“4éĆé„ĖąŲ„Ż¼ėų┐ņėųĘĆČ©Ąž▀Mąą č▓ŠĆ▀\äė┴╦░╔?▓╗▀^Ż¼╚ń╣¹ÖCŲ„╚╦ąąū▀Ą─┬ĘŠĆ╔Ž│²┴╦ų▒ŠĆĪóŪ·ŠĆ▀ĆėąĖ„ĘN┬Ę┐┌ėųįōį§├┤▐k ─ž?▀@┤╬Ą─īŹ“׊═üĒĮŌøQ▀@éĆå¢Ņ}Ż¼Ž╚üĒ┐┤┐┤łD9-5ųą▀@śėĄ─ČĪūų┬Ę┐┌Ż¼ÖCŲ„╚╦æ¬įō▓╔ ė├╩▓├┤śėĄ─▓▀┬į▓┼─▄═©▀^ĪŻ
×ķ┴╦ūīÖCŲ„╚╦│╔╣”═©▀^Ė„ĘN┬Ę┐┌Ż¼ ę╗░Ń╬ęéā▀Ć╩ŪąĶę¬ĮoÖCŲ„╚╦▓ó┼┼░▓╔Ž4éĆé„ĖąŲ„ĪŻ Ą½╩Ū║═ė├╔Ž╣Øšnųąī”4éĆé„ĖąŲ„Ą─╩╣ė├▓╗ę╗śėŻ¼▀@└’ė├ā╚é╚ā╔éĆé„ĖąŲ„Ä═ų·ÖCŲ„╚╦═Ļ│╔ č▓ŠĆĪŻČ°«ö═Ōé╚Ą─ā╔éĆé„ĖąŲ„Öz£yĄĮ║┌ŠĆĢrŻ¼Š═ų¬Ą└┴╦ÖCŲ„╚╦ė÷ĄĮ┴╦┬Ę┐┌ĪŻ▀@ĢrŠ═┐╔ęį Ė∙ō■Š▀¾wŪķørŻ¼ūīÖCŲ„╚╦ū÷│÷▐DÅØäėū„┴╦ĪŻ
īŹ“×Ų„▓─
Īż ęčĮøĮMčb║├Ą─ÖCŲ„╚╦Ż╗
Īż ėŗ╦ŃÖC╝░▄ø╝■ŠÄ│╠ŁhŠ│Ż╗
ĪżUSB Ž┬▌dŠĆŻ╗
Īż ų„┐žųŲŲ„Ż╗
Īż Č┼░Ņ▀BĮėŠĆ╚¶Ė╔Ż╗
Īż 4éĆ╩╣ė├Č┼░Ņ▀BĮėŠĆĄ─Ąž├µ╗ęČ╚Öz£yé„ĖąŲ„Ż╗
Īż ė├║┌╔½─z▓╝š│┘NĄ─ČĪūų┬Ę┐┌ĪŻ
īŹ“×▓Į¾E
1.▀BĮėÖCŲ„╚╦
į┌ÖCŲ„╚╦Ą─Ąū▒P╔Ž▓ó┼┼░▓čb4éĆĄž├µ╗ęČ╚é„ĖąŲ„Ż¼ė├Č┼░Ņ▀BĮėŠĆ░č╦³éā░┤Ēśą“Ęųäe ▀BĮėĄĮų„┐ž░ÕĄ─A0Ī½A3 Č╦┐┌Ż¼ŲõųąZū¾Č╦Ą─é„ĖąŲ„▀BĮėA0 ┐┌Ż¼ZėęČ╦Ą─▀BĮė A3 ┐┌ĪŻ
2.š{įć╗ęČ╚ķōųĄ
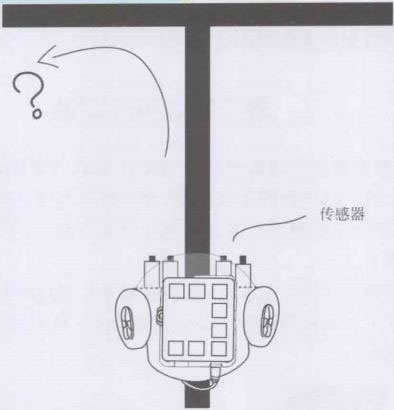
═¼śėŻ¼Ž±ęįŪ░ę╗śė═©▀^īŹ“×┤_Č©ÖCŲ„╚╦╦∙▓╔ė├Ą─╗ęČ╚ķōųĄĪŻę“×ķ4éĆé„ĖąŲ„Ą─ļŖ┬Ę ║═░▓čb╔Ž┐╔─▄Ģ■│÷¼F╬óąĪĄ─▓ŅäeŻ¼╦∙ęį▀@└’▒╚▌^ĘĆ═ūĄ─╠Ä└ĒĘĮ╩Į╩Ū▓╗ꬎė┬ķ¤®Ż¼×ķ╦³éā├┐ éĆČ╝£y┴┐ę╗éĆ╗ęČ╚ķōųĄĪŻ
3.ŠÄ īæ ║═š{įć│╠ą“
═©▀^╔Ž├µĄ─Ęų╬÷┐╔ęįų¬Ą└Ż¼ī”ė┌ÖCŲ„╚╦üĒšfŻ¼ų╗ę¬╩ŪZū¾╗“ZėęČ╦Ą─é„ĖąŲ„Öz£yĄĮ┴╦ ║┌ŠĆŻ¼Š═┤·▒ĒÖCŲ„╚╦ė÷ĄĮ┴╦┬Ę┐┌ĪŻ▀@ĢrŠ═┐╔ęį═Żų╣č▓ŠĆČ°▀M╚ļ90ĪŃ▐DÅØĄ─▀^│╠ĪŻĖ∙ō■▀@ éĆ╦╝┬ĘŻ¼šł═¼īWéāūį╝║╚źŠÄīæ╗“╩Ūģó┐╝Ž┬├µĄ─╩Š└²│╠ą“Ż¼īóÖCŲ„╚╦═©▀^ČĪūų┬Ę┐┌Ą─│╠ą“īŹ ¼FĪŻ▀@éĆ╩Š└²│╠ą“┤¾▓┐ĘųĮYśŗ║═╔Ž╣ØšnĄ─╩Š└²│╠ą“ŅÉ╦ŲŻ¼╦∙▓╗═¼Ą─ų╗╩Ūī”ÖCŲ„╚╦Z═ŌČ╦ ā╔éĆé„ĖąŲ„Öz£yĄĮ║┌ŠĆĢrĄ─╠Ä└ĒŻ¼╬ęéāė├╩Ī┬į╠¢░č═¼╔Ž╣Øšn└²│╠ųžÅ═Ą─┤¾▓┐Ęųā╚╚▌┬į▀^ĪŻ
const int TurnTime=300;
void loop()(
leftValue=analogRead(LeftPort);
leftMiddleValue=analogRead (LeftMiddlePort);
rightMiddleValue=analogRead(RightMiddlePort);
rightValue=analogRead(RightPort);
if(leftValue
analogWrite(RightSpeedPort,ForwardSpeed);
}else if(leftValue>Threshold II rightValue>Threshold){ digitalWrite(LeftDirPort,LOW);
analogWrite(LeftSpeedPort,ForwardSpeed);
analogWrite(RightSpeedPort,ForwardSpeed);
delay(TurnTime);
digitalWrite(LeftDirPort,HIGH);
}else if(leftMiddleValue>Threshold){
analogWrite(LeftSpeedPort,TurnHighSpeed);
analogWrite(RightSpeedPort,TurnLowSpeed); }else{
analogWrite(LeftSpeedPort,TurnLowSpeed);
analogWrite(RightSpeedPort,TurnHighSpeed); }
delay(100);
//įŁĄž▐D90ĪŃ╦∙ąĶĄ─Ģrķg
&&rightMiddleValue< //ų▒ąą
//įŁĄžŽ“ū¾▐D90ĪŃ
//Ž“ėę▐DÅØ
//Ž“ū¾▐DÅØ
//čėĢr.100ms
šłūóęŌŻ¼╚ń╣¹┤¾╝ęų▒Įė╠ūė├╔Ž├µĮo│÷Ą─╩Š└²│╠ą“Ż¼ÖCŲ„╚╦═∙═∙╩Ū▓╗Ģ■╣į╣įĄž═©▀^┬Ę┐┌ Ą─ĪŻ▀@ĢrŻ¼Š═ąĶ꬚ł═¼īWéāūą╝Üė^▓ņÖCŲ„╚╦ė÷ĄĮ┬Ę┐┌Ą─Ę┤æ¬ĪŻ╚╗║¾Ż¼Ė∙ō■ÖCŲ„╚╦▀\äėĢr╦∙ ▒Ē¼F│÷Ą─¼FŽ¾▓╗═¼Ż¼ī”å¢Ņ}Ą─╦∙į┌▀Mąą┼ąöÓ▓óĮŌøQĪŻ▒╚╚ńŻ¼ÖCŲ„╚╦Ą─é„ĖąŲ„Č╦┐┌ĮėŠĆĄ─Ēś ą“ėąÕeš`Ż╗ÖCŲ„╚╦▐D90ĪŃÅØĄ─╦┘Č╚╗“ĢrķgģóöĄ▓╗║Ž▀mŻ¼ī¦ų┬▐DŽ“▀^Č╚╗“▓╗ūŃĄ╚ĪŻŠ═╩Ūį┌▀@ éĆ▀^│╠ųą┤¾╝ęĮŌøQå¢Ņ}Ą──▄┴”▓┼Ģ■Ą├ĄĮ╠ßĖ▀Ż¼ę“┤╦šł═¼īWéāŪ¦╚f▓╗ę¬ØMūŃė┌┼¬Č«┴╦įŁ└ĒŻ¼ ę╗ Č©ę¬äė╩ųäė─XŻ¼ī”ÖCŲ„╚╦▀MąąīŹļHĄ─š{įć╣żū„ĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |