| äō(chu©żng)Ø╔ÖC(j©®)Ų„╚╦ |
| CHUANGZE ROBOT |
| äō(chu©żng)Ø╔ÖC(j©®)Ų„╚╦ |
| CHUANGZE ROBOT |
ļŖ╬╗Ų„╩ŪZ║åå╬Ą─╬╗ų├é„ĖąŲ„Ż¼╚ńłD2.1╦∙╩ŠĪŻļŖ╬╗Ų„═© ▀^ļŖūĶ░č╬╗ų├ą┼Žó▐D(zhu©Żn)╗»×ķļS╬╗ų├ūā╗»Ą─ļŖē║Ż¼═©▀^Öz£y▌ö│÷ļŖ ē║Ą─ūā╗»┤_Č©ęįļŖūĶųąą─×ķ╗∙£╩(zh©│n)╬╗ų├Ą─ęŲäėŠÓļxĪŻ«ö(d©Īng)ļŖūĶŲ„ ╔ŽĄ─╗¼äėė|Ņ^ļS╬╗ų├ūā╗»į┌ļŖūĶŲ„╔Ž╗¼äėĢrŻ¼ė|Ņ^Įėė|³c(di©Żn)ūā╗» Ū░║¾Ą─ļŖūĶūĶųĄ┼c┐éūĶųĄų«▒╚Š═Ģ■░l(f©Ī)╔·ūā╗»ĪŻį┌╣”─▄╔ŽŻ¼ļŖ╬╗ Ų„│õ«ö(d©Īng)┴╦Ęųē║Ų„Ą─ū„ė├Ż¼ę“┤╦▌ö│÷ļŖē║Vout ┼c┐╔ūāļŖūĶr │╔ ▒╚ └²Ż¼╝┤
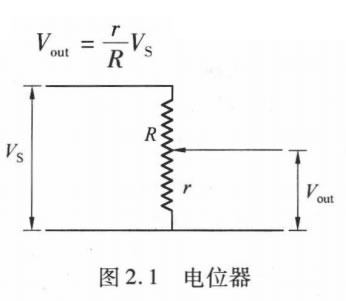
ļŖ╬╗Ų„═©│Żė├ū„ā╚(n©©i)▓┐Ę┤üé„ĖąŲ„Ż¼üĒÖz£yĻP(gu©Īn)╣Ø(ji©”)║═▀BŚUĄ─╬╗ų├ĪŻ
╣ŌļŖŠÄ┤aŲ„╩Ūę╗ĘN─▄Öz£y╝Ü(x©¼)╬ó▀\(y©┤n)äėĪó▌ö│÷öĄ(sh©┤)ūųą┼╠¢Ą─čbų├ĪŻ╦³īółA╣Ō¢┼─¬Ā¢Śl╝y║═╣ŌļŖ ▐D(zhu©Żn)ōQ╝╝ąg(sh©┤)ŽÓĮY(ji©”)║ŽŻ¼īóÖC(j©®)ąĄ▐D(zhu©Żn)äėĄ─ĮŪČ╚▐D(zhu©Żn)ōQ│╔öĄ(sh©┤)ūųļŖą┼Žó┴┐▌ö│÷ĪŻ
╣ŌļŖŠÄ┤aŲ„╩Ū¼F(xi©żn)į┌▒╚▌^┴„ąąĄ─é„ĖąŲ„Ż¼┐╔Ęų×ķį÷┴┐╩Į(å╬═©Ą└)╣ŌļŖŠÄ┤aŲ„║═Į^ī”╩Į(ČÓ ═©Ą└)╣ŌļŖŠÄ┤aŲ„ĪŻ
(1)į÷┴┐╩Į╣ŌļŖŠÄ┤aŲ„ĪŻ╚ńłD2.2╦∙╩ŠŻ¼į÷┴┐╩Į╣Ō ļŖŠÄ┤aŲ„ė╔╣Ōį┤Īó┤a▒PĪó╣Ō├¶Š¦¾w╣▄ĮM│╔Ż¼┤a▒P╔Žėą═Ė ╣Ō║═▓╗═Ė╣ŌĄ─╗ĪČ╬Ż¼│▀┤ńŽÓ═¼ŪęĮ╗╠µ│÷¼F(xi©żn)ĪŻė╔ė┌╦∙ėąĄ─ ╗ĪČ╬│▀┤ńŽÓ═¼Ż¼├┐Č╬╗Ī╦∙▒Ē╩ŠĄ─ą²▐D(zhu©Żn)ĮŪŽÓ═¼Ż¼┤a▒P╔ŽĄ─ ╗ĪČ╬įĮČÓŻ¼Š½Č╚įĮĖ▀Ż¼Ęų▒µ┬╩Š═įĮĖ▀ĪŻ«ö(d©Īng)╣Ōą²▐D(zhu©Żn)═©▀^┤a ▒P╔Ž╗ĪČ╬ĢrŻ¼▌ö│÷▀B└m(x©┤)Ą─├}ø_ą┼╠¢Ż¼ī”▀@ą®ą┼╠¢ėŗöĄ(sh©┤)Ż¼Š═ ─▄ėŗ╦Ń│÷┤a▒P▐D(zhu©Żn)▀^Ą─ŠÓļxĪŻ
į÷┴┐╩ĮŠÄ┤aŲ„āHÖz£y▐D(zhu©Żn)ĮŪ╬╗ų├╗“ų▒ŠĆ╬╗ų├Ą─ūā╗»Ż¼ ╝┤ęŲäė┴╦ČÓ╔┘Ż¼Č°▓╗─▄┼ąöÓīŹ(sh©¬)ļH╬╗ų├ĪŻÖC(j©®)Ų„╚╦Ą─Ų³c(di©Żn)▓╗═¼Ż¼ŲõZĮKĄ─╬╗ų├ę▓▓╗═¼ĪŻę“┤╦Ż¼ę¬┤_ Č©ÖC(j©®)Ų„╚╦Ą─╬╗ų├▀Ćę¬ų¬Ą└Ų╩╝╬╗ų├Ż¼▀@śė║▄ļyĪŻę“┤╦Ż¼į┌├┐┤╬┐žųŲĢrę¬Å═(f©┤)╬╗Ż¼╩╣ŠÄ┤aŲ„Ą─▌ö│÷ ×ķ0,▀@śėŠÄ┤a▒Pūx│÷Ą─öĄ(sh©┤)ō■(j©┤)Š═Ą╚ė┌ÖC(j©®)Ų„╚╦ęŲäėĄ─ŠÓļxĪŻ
(2)Į^ī”╩Į╣ŌļŖŠÄ┤aŲ„ĪŻĮ^ī”╩Į╣ŌļŖŠÄ┤aŲ„┤a▒PĄ─├┐éĆ╬╗ų├Č╝ī”æ¬(y©®ng)ų°═Ė╣Ō┼c▓╗═Ė╣Ō╗ĪČ╬ Ą─Wę╗┤_Č©ĮM║ŽŻ¼▀@ĘN┤_Č©ĮM║ŽėąWę╗Ą─╠žš„ĪŻ═©▀^▀@Wę╗Ą─╠žš„Ż¼▓╗ąĶę¬ęčų¬Ų╩╝╬╗ų├Ż¼į┌ ╚╬ęŌĢr┐╠Š═┐╔ęį┤_Č©┤a▒PĄ─£╩(zh©│n)┤_╬╗ų├ĪŻį┌Ų╩╝Ģr┐╠Ż¼┐žųŲŲ„═©▀^┼ąöÓ┤a▒P╦∙į┌╬╗ų├Ą─Wę╗ą┼ ╠¢╠žš„Ż¼─▄ē“┤_Č©ÖC(j©®)Ų„╚╦╦∙į┌Ą─╬╗ų├ĪŻ
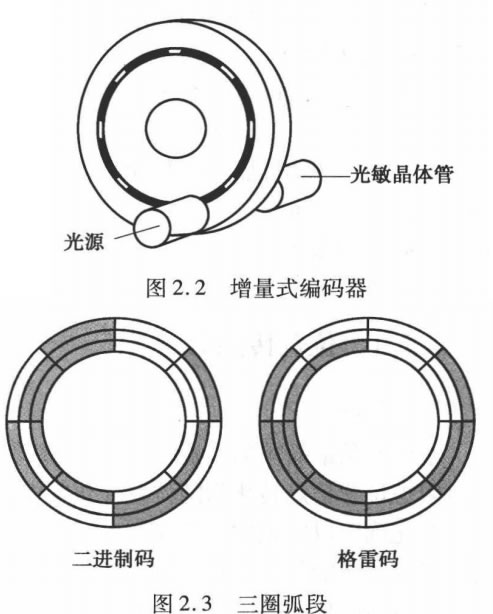
╚ńłD2.3╦∙╩ŠŻ¼├┐éĆ╬╗ų├ī”æ¬(y©®ng)ų°═Ė╣Ō┼c▓╗═Ė╣Ō╗ĪČ╬Ż¼╗ĪČ╬ė╔ČÓ╚”╗ĪČ╬(ČÓ═©Ą└)ĮM│╔Ż¼├┐éĆ ČÓ╚”╗ĪČ╬ī”æ¬(y©®ng)▓╗═¼Ą─┤aŻ¼▀@ą®┤aėąČ■▀M(j©¼n)ųŲ┤a║═Ė±└ū┤aĪŻį┌Č■▀M(j©¼n)ųŲ┤aųąŻ¼Įø(j©®ng)│ŻĢ■░l(f©Ī)╔·ČÓė┌ā╔╬╗═¼ ĢrĖ─ūāĀŅæB(t©żi)Ą─Ūķą╬Ż╗Č°į┌Ė±└ū┤aųąŻ¼├┐┤╬ų╗ėąę╗╬╗Ž“Ū░╗“Ž“║¾ūā╗»ĪŻ▀@ĘN▓ŅäeĄ─ųžę¬ąįį┌ė┌Ż¼ į┌öĄ(sh©┤)ūų£y┴┐ųąŻ¼£y┴┐ŽĄĮy(t©»ng)▓óĘŪ╩╝ĮKūx╚Īą┼╠¢ųĄŻ¼Č°╩ŪꬥĮŽ┬ę╗éĆ▓╔śė³c(di©Żn)▓┼ūx╚Īą┼╠¢ųĄŻ¼Ųõķgą┼ ╠¢▒Ż│ų▓╗ūāĪŻį┌Č■▀M(j©¼n)ųŲ┤aųąŻ¼═¼ę╗Ģr┐╠ėą┐╔─▄ėąČÓė┌ę╗éĆą┼╠¢░l(f©Ī)╔·ūā╗»Ż¼╚ń╣¹╦∙ėąą┼╠¢▓╗╩Ū═¼ Ģrūā╗»Ż¼ät▓╔śėĢr┐╔─▄ūx╚Ī▓╗ĄĮ╦∙ėą╬╗Ą─ūā╗»ĪŻį┌Ė±└ū┤aųąŻ¼ė╔ė┌═¼ę╗Ģr┐╠ų╗ėąę╗éĆą┼╠¢░l(f©Ī)╔·ūā╗»Ż¼ę“┤╦┐é─▄Öz£yĄĮą┼╠¢Ą─ūā╗»ĪŻ
é„ĖąŲ„╚”ė╔öĄ(sh©┤)┴┐▓╗Ą╚Ą─╗ĪČ╬ĮM│╔Ż¼├┐╚”Č╝ėą ę╗éĆd┴óĄ─╣Ōį┤║═╣Ō├¶é„ĖąŲ„ĮM╝■Ż¼├┐éĆ╣Ō├¶é„ ĖąŲ„ĮM╝■Č╝▌ö│÷ą┼╠¢Ż¼ę“┤╦ā╔╚”Öz£y╗ĪČ╬ąĶę¬┐ž ųŲŲ„ėąā╔╬╗▌ö╚ļŻ¼╚²╚”Öz£y╗ĪČ╬ąĶę¬┐žųŲŲ„ėą╚² ╬╗▌ö╚ļŻ¼ę└┤╦ŅÉ═ŲĪŻ
│²┴╦£y╬╗ęŲ═ŌŻ¼Į^ī”╩ĮŠÄ┤aŲ„▀Ć┐╔£y╦┘Č╚ĪŻ ī”ė┌╚╬ęŌĮoČ©Ą─ĮŪ╬╗ęŲŻ¼ŠÄ┤aŲ„īó«a(ch©Żn)╔·┤_Č©Ą─├}
ø_öĄ(sh©┤)ĪŻ═©▀^ėŗöĄ(sh©┤)ę╗Č©ĢrķgĄ─├}ø_öĄ(sh©┤)Ż¼Š═─▄ėŗ╦Ń│÷ ŽÓæ¬(y©®ng)Ą─ŲĮŠ∙ĮŪ╦┘Č╚Ż¼ĢrķgįĮČ╠Ż¼Ą├ĄĮĄ─╦┘Č╚ųĄŠ═įĮĮėĮ³šµīŹ(sh©¬)ųĄŻ¼╝┤╦▓Ģr╦┘Č╚ĪŻĄ½╩Ū«ö(d©Īng)ŠÄ┤aŲ„▐D(zhu©Żn) äė║▄┬²ĢrŻ¼£yĄ├Ą─╦┘Č╚┐╔─▄Ģ■ūāĄ├▓╗£╩(zh©│n)┤_ĪŻ═¼śėŻ¼ė╔ė┌ŠÄ┤aŲ„┤a▒Pų▒ÅĮĪóęŲäėÖC(j©®)Ų„╚╦▌åÅĮ╣╠Č© ┐╔ų¬Ż¼Į^ī”╩ĮŠÄ┤aŲ„ę▓┐╔ęį£yŠĆ╦┘Č╚ĪŻ
╣ŌļŖŠÄ┤aŲ„░³└©ų▒ŠĆą═║═ą²▐D(zhu©Żn)ą═ĪŻŲõųąą²▐D(zhu©Żn)ą═ę╗░Ńė├į┌▌å╩ĮÖC(j©®)Ų„╚╦Ą─ū¾Īóėę▌å╔ŽĪŻ
 |
| ÖC(j©®)Ų„╚╦Ąū▒P Disinfection Robot Ž¹ČŠÖC(j©®)Ų„╚╦ ųvĮŌÖC(j©®)Ų„╚╦ ėŁ┘eÖC(j©®)Ų„╚╦ ęŲäėÖC(j©®)Ų„╚╦Ąū▒P ╔╠ė├ÖC(j©®)Ų„╚╦ ųŪ─▄└¼╗°šŠ ųŪ─▄Ę■äš(w©┤)ÖC(j©®)Ų„╚╦ ┤¾Ų┴ÖC(j©®)Ų„╚╦ ņF╗»Ž¹ČŠÖC(j©®)Ų„╚╦ š╣ÅdÖC(j©®)Ų„╚╦ Ę■äš(w©┤)ÖC(j©®)Ų„╚╦Ąū▒P Š▀╔ĒųŪ─▄Į╠ė²ÖC(j©®)Ų„╚╦ ųŪ─▄┼õ╦═ÖC(j©®)Ų„╚╦ ī¦(d©Żo)ė[ÖC(j©®)Ų„╚╦ |