╗∙ė┌X86 ÖCŲ„╚╦┐žųŲŲ„ŲĮ┼_
X86 ŽĄĮy╩ŪĮøĄõĄ─ėŗ╦ŃÖCŽĄĮyŲĮ┼_Ż¼Įø▀^┴╦öĄ╩«─ĻĄ─īŹļHæ¬ė├║═▓╗öÓĄ─╝╝ąg ╔²JŻ¼ęč▀_ĄĮ┴╦ĘŪ│Ż│╔╩ņĘĆČ©Ą─┐žųŲąį─▄Ż¼─┐Ū░╣żśI┐žųŲŅIė“Īó╔╠ė├ŅIė“Īó▐k╣½ ŅIė“Īó╝ęė├ŅIė“Č╝┤¾┴┐╩╣ė├╗∙ė┌X86 Ą─ėŗ╦ŃÖCŽĄĮyĪŻć°ā╚═Ōėą║▄ČÓÖCŲ„╚╦┐žųŲŲ„ ę▓╩Ū╗∙ė┌ X86 ŲĮ┼_Ż¼║▄ČÓÖCŲ„╚╦ķ_░lŁhŠ│Īó╣”─▄▄ø╝■ĪóįOėŗ╣żŠ▀Ą╚ę▓Č╝╩Ū╗∙ė┌ X86 ŲĮ┼_╦∙śŗĮ©Ą─Ż¼ę“┤╦Å─×ķ┴╦ØMūŃ▄øė▓╝■Ą─╝µ╚▌ąį║═│ą└^ąįĘĮ├µ┐╝æ]Ż¼čąųŲ┴╦ ╗∙ė┌X86 ŽĄĮyĄ─ÖCŲ„╚╦─ŻēK╗»ė▓╝■ŲĮ┼_ĪŻ
╗∙ė┌ARMĄ─ė▓╝■ŲĮ┼_
ŪČ╚ļ╩ĮŽĄĮyė╔ė┌Ųõ│▀┤ńąĪĪó┐╔▓├╝¶ąįÅŖĪóķ_░lņ`╗ŅĄ╚╠ž³cį┌╣żśI┐žųŲŅIė“║═ ╔╠ė├ļŖūėĘĮ├µČ╝ęčųØuš╝ō■┴╦ā×ä▌Ąž╬╗Ż¼ī”ė┌ÖCŲ„╚╦┐žųŲČ°čįŻ¼ŪČ╚ļ╩ĮŽĄĮyŽÓī” ė┌é„ĮyÖCŲ„╚╦┐žųŲŲ„ę▓Š▀ėą├„’@Ą─ā×ä▌ĪŻČ°į┌ŪČ╚ļ╩ĮŽĄĮyųą ARM ╠Ä└ĒŲ„Š▀ėąĄ═│╔▒ŠĪóĄ═╣”║─Īó╠Ä└Ē─▄┴”ÅŖĪó═Ō▓┐Įė┐┌ČÓĄ╚╠ž³cŻ¼ęčĮøų▓Į│╔×ķŪČ╚ļ╩ĮŽĄĮyųąĄ─ų„┴„╠Ä└ĒŲ„Ż¼▓╔ė├╠Ä└Ē─▄┴”▌^ÅŖĄ─ą┬ą═ARM Cortex-A8╠Ä└ĒŲ„×ķ║╦ą─Ż¼ĮY║ŽDSP Ą╚Ųõ╦¹╠Ä└ĒŲ„Ż¼įOėŗ┴╦Ęų▓╝╩ĮÖCŲ„╚╦┐žųŲŲ„Ż¼ęį╠ßĖ▀Ųõ┐žųŲŽĄĮyŻ¼ĮĄĄ═┐žųŲŲ„│╔▒Š ĪŻ
ę╗¾w╗»ÖCŲ„╚╦─ŻēK╗»ĻP╣Ø
ÖCŲ„╚╦─ŻēK╗»ĻP╣ØĮYśŗ╚ńłD2-8╦∙╩ŠŻ¼ų„ę¬░³║¼ęįŽ┬Äū┤¾▓┐ĘųĪŻ
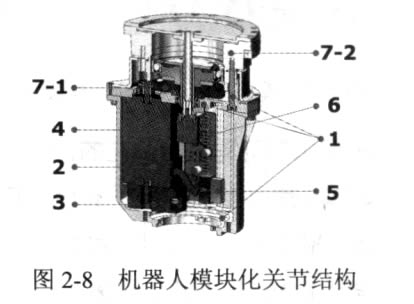
(1)Üż¾w╝░ų¦ō╬ĮYśŗŻ╗
(2)ų▒┴„¤o╦ó╦┼Ę■ļŖÖCŻ╗
(3)ą²▐DŠÄ┤aŲ„(£y╦┘é„ĖąŲ„Ż¼īŹ¼FŽÓī”╬╗ų├ŁhĪó╦┘Č╚Łh);
(4)Į^ī”ŠÄ┤aŲ„(Öz£yĮ^ī”╬╗ų├Ż¼¤ošō╩ŪʱĄ¶ļŖ);
(5)ļŖūėäx▄ćļŖ┬Ę(└¹ė├└^ļŖŲ„▀xō±ąįČ╠┬ĘļŖÖCA/B/C ŽÓ└@ĮMŠĆ╚”Ż¼į┌¤oÖC ąĄäx▄ćĄ─Śl╝■Ž┬īŹ¼Fį┘╔·ųŲäė);
(6)╦┼Ę■“īäėļŖ┬Ę(īŹ¼F╦┼Ę■┐žųŲŻ¼ā╚ų├ļŖ┴„é„ĖąŲ„Ż¼īŹ¼FļŖ┴„ŁhĪó▀^¤ßĪó ▀^┴„Īó▀^ē║/ŪĘē║Ą╚▒ŻūoŻ¼▓óĮė│÷CAN ║═ RS232 ═©ą┼┐┌);
(7)£p╦┘ÖCśŗ┐é│╔(░³║¼│§J£p╦┘ė├²X▌åĮM7-1║═┤╬J£p╦┘ė├ųC▓©£p╦┘Ų„7-2)
═©▀^ś╦£╩Ą─ROS ═©ą┼ģfūhīŹ¼FīŹĢr╣سc┼cīŹĢr╣سcĪóīŹ Ģr╣سc┼cĘŪīŹĢr╣سcų«ķgĄ─═©ą┼Ż¼▓óŪęé„▀fĘ¹║ŽROSģfūhęÄĘČĄ─Ž¹Žó,īŹĢr╣سc║═īŹĢrŽĄĮyÆņ▌dĄ─═Ō▓┐įOéõ▀MąąĮ╗╗ź
ęŲäėŲĮ┼_Ą─žō▌dįĮ┤¾,ī”Ąū▒PĮYśŗĪó ļŖÖCę¬Ū¾įĮĖ▀,│╔▒Š’@ų°į÷╝ė;ÖCąĄ▒█Ą─▌SöĄ┼cžō▌d,▌SöĄ┼cžō▌dārĖ±═©│ŻįĮĖ▀;─®Č╦ł╠ąąŲ„╩ŪČ©ųŲ╗»Ą─Å═ļs╣żŠ▀Š═│╔▒ŠĖ▀
ÖCŲ„╚╦Ą─┤¾─XĪ¬ų„┐žųŲŲ„,╩ŪÖCŲ„╚╦ūŅ║╦ą─Ą─▓┐╝■;ÖCŲ„╚╦Ą─č█Š”ĪóČ·Čõ║═ė|ĮŪĪ¬é„ĖąŲ„,─▄ē“Ė∙ō■ŁhŠ│Ą─ūā╗»ū÷│÷Ę┤æ¬;ÖCŲ„╚╦Ą─ūŃĪ¬“īäėŲ„,ÖCŲ„╚╦Ą─╩ųĪ¬ł╠ąąŲ„
╚ßąįĻP╣Øīó╩╣ÖCŲ„╚╦½@Ą├Ė³Ė▀Ą─ūįė╔Č╚,╚ßąįĻP╣Øę“Ųõ╬³─▄ū„ė├Ż¼ī”ė┌ÖCŲ„╚╦ŽĄĮyŻ¼╠ž äe╩ŪęŲäė╩ĮÖCŲ„╚╦ŽĄĮyŻ¼Š▀ėąĘ└ū▓ō¶ĪóĘ└š±äėĄ╚▒Żūoū„ė├
(1)┐ŲīWĄ──┐Ą─ĪŻ│÷ė┌┐ŲīW蹊┐Ą─ąĶę¬(╚ńĘ┬╔·īW蹊┐Ą─ąĶę¬)Č°įOėŗśŗįņ╚ßąįÖCŲ„╚╦ŽĄĮy;(2)╣ż│╠Ą──┐Ą─ĪŻ│÷ė┌╣ż│╠īŹ█`Ą─ąĶę¬(╚ń╠žČ©╣”─▄Ą─ąĶŪ¾╝░īŹ¼F)Č°įOėŗśŗįņ╚ßąįÖCŲ„╚╦ŽĄĮyĪŻ
ā╔▌åÖCŲ„╚╦Ą─▀\äėŲĮ║Ō┐žųŲå¢Ņ}╔µ╝░ā╔éĆĘĮ├µ,ę╗╩ŪĪ░ŲĮ║ŌĪ▒,╝┤ū╦æBŲĮ║Ō┐žųŲĄ─å¢Ņ}Ż╗Č■╩ŪĪ░▀\äėĪ▒,╝┤▀\äė▄ē█E┐žųŲĄ─å¢Ņ};ā╔▌åÖCŲ„╚╦Ą─▀\äė▄ē█E┐žųŲå¢Ņ}Ż¼╩ŪŲõąą▀M╦┘Č╚║═ąą▀MĘĮŽ“Ą─┐žųŲå¢Ņ}
Ąū▒Pų„ę¬ė├ė┌░▓čb╗“▀BĮėÖC¾w┼c▌åŽĄŻ¼öyĦ║═╣╠Č©“īäėŽĄĮy;ÖC¾w┐╔čb▌dĖ„ĘNļŖūėįOéõ;▌åŽĄ═©▀^▌å▌S╗“é„äėÖCśŗ░▓čbį┌Ąū▒PĄ─ū¾ėęā╔é╚Ż¼Ęųäeė╔ū¾ļŖÖC║═ėęļŖÖC“īäė
ŠžĻćé„ĖąŲ„ŠWĮjŠ═─▄ē“╠ß╣®╬’¾wą╬ĀŅĄ─Å═ļsöĄō■,▀@ĘNą┼ŽóĘų╬÷╝╝ągĮąū÷ą╬ĀŅūRäe ,▓╔ė├ē║ļŖį¬╝■Ą─ŠžĻćé„ĖąŲ„,─▄ē“½@Ą├╬’¾wū„ė├┴”ą╬│╔Ą─ė│Ž±
╬óą═ķ_ĻP┐╔─▄╩ŪĮėė|é„ĖąŲ„ūŅĮøØ·║═ūŅ│Żė├Ą─ŅÉą═,ūo╬’¾w▓╗╩▄ĄĮ▀^┤¾Ą─ū„ė├┴”;Ė¶ļx╩ĮļpæBĮėė|é„ĖąŲ„ŽĄĮyų„ę¬ė╔ļpĘĆæBķ_ĻPĮM│╔,ųžÅ═Č╚┐╔▀_1”╠m, Ęų▒µČ╚×ķ2 ”╠m
Įī┘ļŖūĶą═┴”ėXé„ĖąŲ„£yČ©ļŖūĶĮzĄ─ūĶųĄūā╗»Ż¼Š═┐╔ų¬Ą└╬’¾wĄ─ą╬ūā┴┐Ż¼▀MČ°Ū¾│÷═Ōū„ė├┴”;░ļī¦¾wą═┴”ėXé„ĖąŲ„Ą─æ¬ūāŽĄöĄ┐╔▀_100Ī½200,│▀┤ńąĪŻ¼ņ`├¶Č╚Ė▀Ż¼ę“Č°┐╔┐┐ąį║▄Ė▀
ė╔╦┘Č╚£y┴┐▀Mąą═Ųč▌,▀@ĘNĘĮĘ©║▄ļy½@Ą├ØMęŌĄ─£y┴┐ĮY╣¹;ęčų¬┘|┴┐Ą─╬’¾w╝ė╦┘Č╚╦∙«a╔·Ą─┴”╩Ū┐╔ęį£y┴┐Ą─;┼c▒╗£y╝ė╦┘Č╚ėąĻPĄ─┴”┐╔ęį×ķļŖ┤┼┴”╗“ļŖäė┴”,░čĘĮ│╠╩Į║å╗»×ķī”ļŖ┴„Ą─£y┴┐å¢Ņ}
ų▒┴„£y╦┘░lļŖÖC╦³é„╦═ę╗éĆš²▒╚ė┌╩▄┐ž╦┘Č╚Ą─ų▒Įėą┼╠¢ĪŻ▀@ĘNé„Ėą Ų„Ą─▀xō±╩Ūė╔ŲõŠĆąįČ╚(┐╔▀_0.1%)Īó┤┼£■│╠Č╚ĪóūŅ┤¾┐╔ė├╦┘Č╚(▀_3000Ī½8000r/min) ęį ╝░æT┴┐ģóöĄøQČ©Ą─