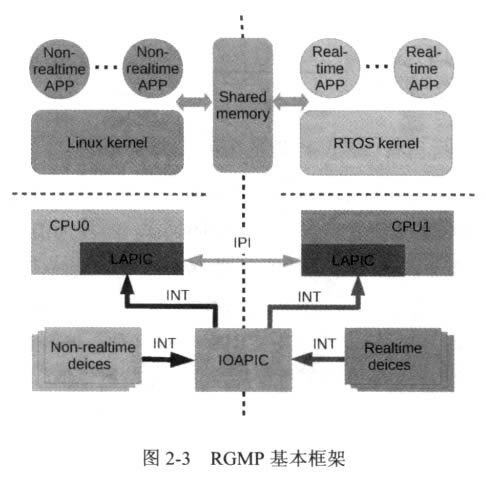
RGMP ╩Ūę╗éĆ└¹ė├ČÓ║╦╝▄śŗīŹ¼FĄ─īŹĢr┼cĘŪīŹĢr▓┘ū„d┴ó▀\ąąĄ─╗ņ║Ž▓┘ū„ ŽĄĮy┐“╝▄Ż¼╚ńłD2-3╦∙╩ŠĪŻ═©ė├▓┘ū„ŽĄĮy(Linux) ║═īŹĢr▓┘ū„ŽĄĮy(RTOS) į┌ Ė„ūįĄ─ CPU ╔Žd┴ół╠ąąĪŻI/O įOéõ▒╗Ęų│╔īŹĢrįOéõ║═ĘŪīŹĢrįOéõŻ¼Ęųäe▒╗īŹĢr ▓┘ū„ŽĄĮy║═ĘŪīŹĢr▓┘ū„ŽĄĮy┐žųŲĪŻųąöÓ┐žųŲŲ„▒╗ė├ū„ųąöÓ┬Ęė╔Ų„Ż¼īóā╔ĘNįOéõ Ą─ųąöÓą┼╠¢┬Ęė╔ĄĮŽÓæ¬Ą─▓┘ū„ŽĄĮyĪŻŲõųąŻ¼ RTOS Įė╩▄īŹĢrųąöÓŻ¼╚ńļŖÖC“īäėĪó é„ĖąŲ„Ą╚«a╔·Ą─ųąöÓą┼╠¢Ż╗Linux Įė╩▄ĘŪīŹĢrųąöÓŻ¼╚ń╚╦ÖCĮ╗╗źĪó’@╩ŠĄ╚ųąöÓą┼ ŽóĪŻīŹĢr▓┘ū„ŽĄĮy║══©ė├▓┘ū„ŽĄĮyČ╝═Ļ╚½┐žųŲūį╝║Ą─ CPU, ╦∙ęįø]ėąČÓėÓĄ─▄ø ╝■īėąĶę¬Įķ╚ļĄĮ▓┘ū„ŽĄĮy║═ė▓╝■ų«ķgĪŻė▓╝■ųąöÓ▒╗├┐éĆ▓┘ū„ŽĄĮyų▒Įė╠Ä└ĒĪŻ═¼ ĢrĖ„éĆ▓┘ū„ŽĄĮyd┴ó▀\ąąį┌Ė„ūįĄ─CPU ╔Ž▓╗āHĮŌøQ┴╦CPU ╣▓ŽĒå¢Ņ}Ż¼▀Ć─▄┤_▒Ż ▓┘ū„ŽĄĮyų«ķg▓╗Ģ■ŽÓ╗źė░ĒæĪŻ
Nuttx ╩Ūę╗éĆīŹĢrŪČ╚ļ╩Į▓┘ū„ŽĄĮyŻ¼╦³ąĪŪ╔ņ`╗ŅŻ¼▀m║Žį┌╬ó┐žųŲŲ„Ą─ŁhŠ│ųą╩╣ ė├Ż¼▓óŪęŠ▀ėą▌^║├Ą─┐╔öUš╣ąįŻ¼─▄ē“ų¦│ųÅ─ąĪą═(8╬╗)ų┴ųąą═(32╬╗)ŪČ╚ļ╩ĮŽĄ Įy ĪŻNuttx ęį═Ļ╚½Ę¹║Žś╦£╩Īó═Ļ╚½īŹĢr║══Ļ╚½ķ_Ę┼×ķ░lš╣─┐ś╦Ż¼╠ß╣®┴╦ÖCŲ„╚╦▓┘ū„ ŽĄĮy╦∙ąĶĄ─│Żė├╣”─▄Ż║UIP ģfūhŚŻĪóShellĪó╗∙▒ŠC ÄņĪó║åå╬Ą─ÄūéĆC++ÄņĄ╚ĪŻ×ķ┴╦ ĮŌøQROS īŹĢrąį─▄▓╗ūŃĄ─å¢Ņ}Ż¼╗∙ė┌╔Ž╩÷╝╝ągę¬³cŻ¼└¹ė├RGMP ▒Š╔Ē╗ņ║Ž▓┘ū„ŽĄ Įy╝▄śŗĄ─ā׳cŻ¼═©▀^īóNuttx īŹĢr▓┘ū„ŽĄĮyęŲų▓ĄĮRGMP Ą─īŹĢr▓┐ĘųŻ¼īŹ¼F┴╦╗∙▒Š ╗ņ║Ž▓┘ū„ŽĄĮyĄ─śŗĮ©Ż¼äōįņ┴╦ę╗éĆØMūŃīŹĢrąįąĶꬥ─ ROS ╗ņ║ŽÖCŲ„╚╦▓┘ū„ŽĄĮy RGMP-ROSĪŻ
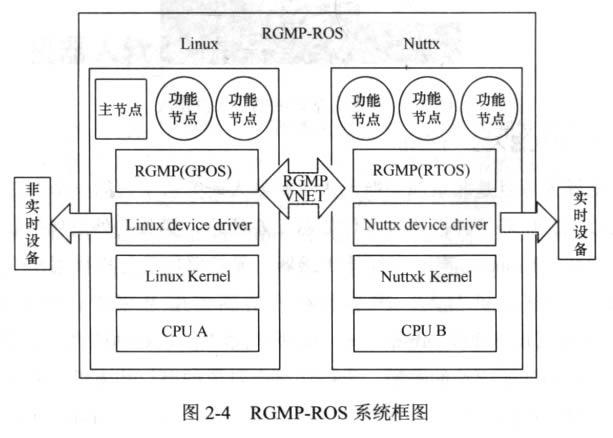
RGMP-ROSĄ─ŽĄĮy┐“łD╚ńłD2-4╦∙╩ŠŻ¼š¹éĆÖCŲ„╚╦╗ņ║Ž▓┘ū„ŽĄĮyė╔ā╔éĆ▓┐ĘųĮM │╔Ż║ę╗éĆ╩Ū░▓čbį┌Linux ╔ŽĄ─ś╦£╩ROS ŽĄĮyŻ¼┴Ēę╗éĆ╩Ū▀\ąąį┌īŹĢr▓┘ū„ŽĄĮyNuttx ╔ŽĄ─īŹĢrROS ŽĄĮyĪŻ╬ęéāīó▀\ąąį┌Linux ╔ŽĄ─ROS ╣”─▄╣سcĘQ×ķĘŪīŹĢrROS ╣سcŻ¼ ▀\ąąį┌īŹĢrŽĄĮy╔ŽĄ─ROS ╣سcĘQ×ķROS īŹĢr╣سcŻ¼╦³éā▀\ąąį┌Ė„ūįĄ─▓┘ū„ŽĄĮyų« ╔ŽĪŻīŹĢr┼cĘŪīŹĢr╣سcų«ķg═©▀^RGMP ╠ß╣®Ą─VNET ╣▄Ą└▀Mąą═©ą┼ĪŻīŹĢrROS ╣Ø ³c▀\ąąį┌Nuttx ų«╔ŽŻ¼─▄ē“═©▀^ś╦£╩Ą─ROS ═©ą┼ģfūhīŹ¼FīŹĢr╣سc┼cīŹĢr╣سcĪóīŹ Ģr╣سc┼cĘŪīŹĢr╣سcų«ķgĄ─═©ą┼Ż¼▓óŪęé„▀fĘ¹║ŽROS ģfūhęÄĘČĄ─Ž¹ŽóĪŻīŹĢr╣سc ═©▀^Nuttx “īäė┼cNuttx ŽĄĮyā╚║╦║═īŹĢrŽĄĮyÆņ▌dĄ─═Ō▓┐įOéõ▀MąąĮ╗╗źŻ¼ęį▀_ĄĮ┐ž ųŲīŹĢrįOéõĄ──┐Ą─ĪŻ×ķ┴╦▒ŻūCīŹĢrąįŻ¼GPOS ┼c RTOS Ė„ūįōĒėąd┴óĄ─═ŌįOĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |