īŹ“×Ų„▓─
Īż ĮMčb║├Ą─ÖCŲ„╚╦Ż╗
Īż ėŗ╦ŃÖC╝░ŠÄ│╠ŁhŠ│Ż╗
ĪżUSB Ž┬▌dŠĆŻ╗
Īż Å═č█é„ĖąŲ„1éĆŻ╗
Īż Ħś¬╚~Ą─ų▒┴„ąĪļŖÖC1éĆŻ╗
Īż └^ ļŖ Ų„ 1 éĆ Ż╗
Īż ╬óė|ķ_ĻPé„ĖąŲ„1éĆĪŻ
īŹ“×▓Į¾E
▀@┤╬īŹ“׹Ķę¬×ķÖCŲ„╚╦į┌D3 Č╦┐┌░▓čbę╗éĆ╬óė|ķ_ĻPé„ĖąŲ„Ż¼į┌D2 Č╦┐┌╔Žčb╔Žę╗éĆ └^ļŖŲ„Ż¼▓óŪę═©▀^╦³“īäėę╗éĆų▒┴„ąĪļŖÖCĪŻ═¼ĢrŻ¼╬ęéāīóÅ═č█é„ĖąŲ„▀BĮėĄĮA0Ī½A4 Č╦ ┐┌ĪŻį┌░▓čbÅ═č█é„ĖąŲ„Ą─Ģr║“šł═¼īWéāąĪą─ĮėŠĆĄ─Ēśą“Ż¼╦³┼c╬ęéāŲõ╦¹Ą─é„ĖąŲ„Īół╠ąąŲ„ ╔įėą▓╗═¼Ż¼ļm╚╗š╝ė├┴╦5éĆČ╦┐┌Ż¼Ą½╩Ūų╗ę¬×ķ╦³▀BĮėę╗Ė∙+5VĄ─ļŖį┤ŠĆ║═ę╗Ė∙ĄžŠĆŠ═┐╔ ęį┴╦ĪŻ
Ž╚ŠÄīæ│╠ą“Ż¼├┐░┤Ž┬ę╗┤╬╬óė|ķ_ĻPŻ¼Š═ūī’L╔╚Ą─ĀŅæBūā╗»ę╗┤╬ĪŻ▒╚╚ńŻ¼╚ń╣¹’L╔╚š² į┌ą²▐DŻ¼─Ū├┤░┤Ž┬ę╗┤╬ķ_ĻPŻ¼Š═ūī╦³┴ó┐╠═Żų╣Ż¼Ę┤ų«ęÓ╚╗ĪŻī”ė┌╚ń║╬ūx╚Ī╬óė|ķ_ĻPé„ĖąŲ„ Ą─ĀŅæB║═╚ń║╬═©▀^└^ļŖŲ„“īäė’L╔╚Ż¼═¼īWéāČ╝æ¬įō┴╦╚╗ė┌ąž┴╦ĪŻĄ½╩Ū▀@└’Ą─│╠ą“║═▒ŠĢ° ę╗ķ_╩╝ū÷▀^Ą─ķ_ĻPąĪ¤¶Ą─│╠ą“▀Ć╩Ūėą╦∙▓╗═¼Ą─Ż¼╬ęéā┐╔─▄ąĶę¬ī”░┤äė╬óė|ķ_ĻPĄ─┤╬öĄ▀M ąąėŗöĄŻ¼▓┼─▄ų¬Ą└╩▓├┤Ģr║“įō“īäė’L╔╚▐DäėŻ¼╩▓├┤Ģr║“įōūī╦³═Żų╣ĪŻŽ┬├µĮo│÷┴╦ę╗éĆ╩Š└² │╠ą“Ż¼šł┤¾╝ę┴¶ęŌŲõųą╩Ū╚ń║╬╠Ä└Ē╬óė|ķ_ĻPĄ─ėŗöĄĄ─ĪŻ
const int FanPort=2;
const int SwitchPort=3;
int counter=0;
void setup(){
pinMode(FanPort, OUTPUT);
pinMode(SwitchPort,INPUT);
void loop(){
if(digitalRead(SwitchPort)==HIGH){ counter++;
}
if(counter %2==0){
digitalWrite(FanPort,LOW);
}else(
digitalWrite(FanPort,HIGH);
}
delay(200);
į┌▀@éĆ╩Š└²│╠ą“ųąŻ¼├┐┤╬░┤Ž┬╬óė|ķ_ĻPŠ═ūīę╗éĆėŗöĄūā┴┐ūįäėį÷1ĪŻ╚╗║¾Ż¼╬ęéāė├┴╦ ę╗éĆ╚Ī─ŻĄ─▀\╦ŃĪ░%Ī▒,į┌▀@└’Ż¼counter%2 Ą─ĮY╣¹Š═╩Ū▀@éĆėŗöĄūā┴┐│²ęį2Ą─ėÓöĄ╩ŪČÓ ╔┘ĪŻ’@╚╗Ż¼╚ń╣¹ėÓöĄ╩Ū0,─Ū├┤ėŗöĄūā┴┐Š═╩Ū┼╝öĄŻ¼Ę±ätŠ═╩ŪŲµöĄĪŻų«║¾Ą─ā╚╚▌Š═║▄ų▒ė^ ┴╦Ż¼ŲµöĄĢr╬ęéāūī’L╔╚▐DäėŻ¼┼╝öĄĢr═Żų╣Š═┐╔ęį┴╦ĪŻ
▀@éĆ╩Š└²┐┤ŲüĒ╦Ų║§║▄│÷╔½Ż¼┐╔╩ŪīŹļH╔Ž▀@└’ėąę╗éĆ║▄┤¾Ą─å¢Ņ}Ż¼╚ń╣¹═¼īWéā░┤äė░┤ µIĄ─Ģr║“ėąę╗éĆ║▄ąĪĄ─ČČäėŻ¼─Ū├┤Ģ■▓╗Ģ■▒╗ų„┐žŲ„šJ×ķ╩Ū░┤┴╦ā╔┤╬─ž?╗“š▀╚ń╣¹░┤Ž┬░┤ µIĄ─Ģrķg▒╚▌^ķLŻ¼╩Ū▓╗╩Ūę▓Ģ■▒╗šJ×ķ░┤┴╦ČÓ┤╬?ąę▀\Ą─╩ŪŻ¼╬ęéā┐╔ęįė├▄ø╝■Ą─ĘĮĘ©ĮŌøQ▀@ ĘNČČäė╗“░┤µIĢrķg▀^ķLĄ─å¢Ņ}Ż¼šł═¼īWéāūį╝║ćLįćįOėŗę╗éĆĖ─▀MĄ─╦ŃĘ©Ż¼ūīķ_ĻP─▄│÷╔½Ąž ┐žųŲ’L╔╚Ą─▀\ąąĪŻ
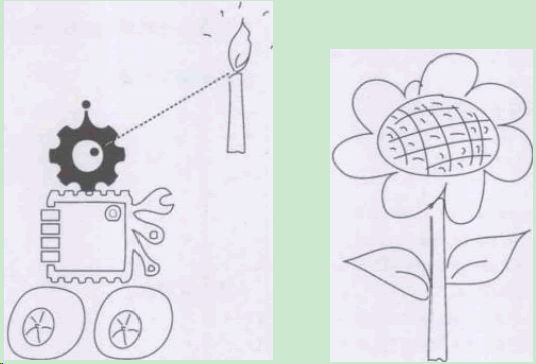
ĮŌøQ┴╦’L╔╚Ą─å¢Ņ}Ż¼į┘üĒ┐┤┐┤╚ń║╬└¹ė├Å═č█é„ĖąŲ„šęĄĮ╗į┤ĪŻ▀@éĆå¢Ņ}┐╔ęįšf╩ŪĄĮ ─┐Ū░×ķų╣├µī”Ą─ZĖ╗╠¶æąįĄ─å¢Ņ}┴╦Ż¼ÖCŲ„╚╦ąĶę¬į┌£ń╗Ą─ł÷Ąžā╚ęį║Ž└ĒĄ─ĘĮ╩Į╠Į╦„īż šę╗į┤Ą─╦∙į┌Ż¼▓óŪę▀\äėĄĮ╗į┤Į³Ū░Ż¼╦³╔µ╝░ÖCŲ„╚╦Ą─£ń╗▓▀┬įĪó┬ĘÅĮęÄäØĪó▀\äė┐žųŲĄ╚ČÓ ĘĮ├µĄ─å¢Ņ}ĪŻ Ą½═¼īWéā▓╗ę¬╬ĘļyŻ¼▀ĆėøĄ├╬ęéāųv▀^Ą─ĘųČ°ų╬ų«Īó║å╗»å¢Ņ}Ą─╦╝Žļåß?▀@└’Š═Ž╚īó▀@ éĆå¢Ņ}║å╗»ĪŻ╝┘įO¼Fį┌ęčĮøėąę╗éĆ╗į┤Š═į┌ÖCŲ„╚╦Ą─╠Į£yĘČć·ā╚ĪŻ╬ęéāę¬ūīÖCŲ„╚╦Ą─ąą ×ķŠ═Ž±╩Ūę╗ČõŽ“╚š┐¹ę╗śėŻ¼╦³ąĶ꬚ęĄĮ╗į┤Ą─ĘĮŽ“▓óŪęįŁĄž▐DäėŻ¼ų▒ĄĮÅ═č█ųąš²ī”Ū░ĘĮĄ─ ─Ūę╗ų╗č█Š”š²ī”╗į┤ĘĮŽ“×ķų╣Ż¼╚ńłD13-5╦∙╩ŠĪŻ
ę¬ĮŌøQ▀@éĆ║å╗»Ą─å¢Ņ}Ż¼ąĶę¬ī”Å═č█Ą─5éĆūxöĄ▀Mąą▒╚▌^Ż¼šęĄĮą┼╠¢ZÅŖĄ─ĘĮŽ“æ¬įō Š═╩Ū╗į┤Ą─ĘĮŽ“┴╦ĪŻļS║¾Š═┐╔ęįūīÖCŲ„╚╦Ė∙ō■╗į┤ĘĮŽ“Ą─▓╗═¼Ż¼▀Mąą╦┘Č╚▓╗═¼Ą─įŁĄž▐DäėĪŻ╚ń╣¹╗į┤į┌Z┐┐═ŌĄ─╬╗ų├Š═┐╔ęį▐DĄ├┐ņą®Ż¼┐┐ā╚Š═▐DĄ├┬²ą®Ż¼╚ń╣¹ęčĮø╩Ūį┌š²ųą┴╦Š═ ┐╔ęį═Żų╣▐Däė┴╦ĪŻ╝┘įOÅ═č█é„ĖąŲ„Å─ū¾ĄĮėęĘųäe▀BĮėĄĮ┴╦ų„┐ž░ÕĄ─A0Ī½A4 Č╦┐┌Ż¼Ž┬├µ Įo│÷┴╦ūīÖCŲ„╚╦īżšę╗į┤Ą─╩Š└²│╠ą“Ż¼šł═¼īWéā┴¶ęŌŲõųą╩Ūį§├┤šęĄĮZÅŖą┼╠¢╬╗ų├Ą─ĪŻ
#define COUNTER_CLOCKWISE 0
#define CLOCKWISE 1
ĪŁ
void turn(int speed,int dir);
void loop(){
int maxValue=0;
int maxPort=A0;
int value;
for(int i=A0;int i
maxPort=i;
}
if(maxPort==A0){
turn(120,CLOCKWISE);
}else if(maxPort==A1){
turn(80,CLOCKWISE);
}else if(maxPort==A2){
turn(0,CLOCKWISE);
}else if(maxPort==A3){
turn(80,COUNTER_CLOCKWISE); }else if(maxPort==A4){
turn(120,COUNTER_CLOCKWISE); }else{
turn(0,CLOCKWISE); }
delay(100);
}
void turn(int speed,int dir){
analogWrite(LeftSpeedPort,speed);
analogWrite(RightSpeedPort,speed);
if(dir==CLOCK){
digitalWrite(LeftDirPort,HIGH); digitalWrite(RightDirPort,LOW);
}else(
digitalWrite(LeftDirPort,LOW);
digitalWrite(RightDirPort,HIGH);
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |