īŻ╝ę┐žųŲŽĄĮy(t©»ng)╩Ūę╗éĆ(g©©)æ¬(y©®ng)ė├īŻ╝ꎥĮy(t©»ng)╝╝ąg(sh©┤)Ą─┐žųŲŽĄĮy(t©»ng)Ż¼ę▓╩Ūę╗éĆ(g©©)Ąõą═Ą─║═ÅVĘ║æ¬(y©®ng)ė├Ą─╗∙ė┌ų¬ūR(sh©¬)Ą─┐žųŲŽĄĮy(t©»ng)ĪŻ
īŻ╝ę┐žųŲŽĄĮy(t©»ng)ę“æ¬(y©®ng)ė├ł÷(ch©Żng)║Ž║═┐žųŲę¬Ū¾▓╗═¼Ż¼ŲõĮY(ji©”)śŗ(g©░u)ę▓┐╔─▄▓╗ę╗śėĪŻ╚╗Č°Ż¼Äū║§╦∙ėąĄ─ īŻ╝ę┐žųŲŽĄĮy(t©»ng)(┐žųŲŲ„)Č╝░³║¼ų¬ūR(sh©¬)Äņ(k©┤)Īó═Ų└ĒÖC(j©®)Īó┐žųŲęÄ(gu©®)ät╝»║═/╗“┐žųŲ╦ŃĘ©Ą╚ĪŻ
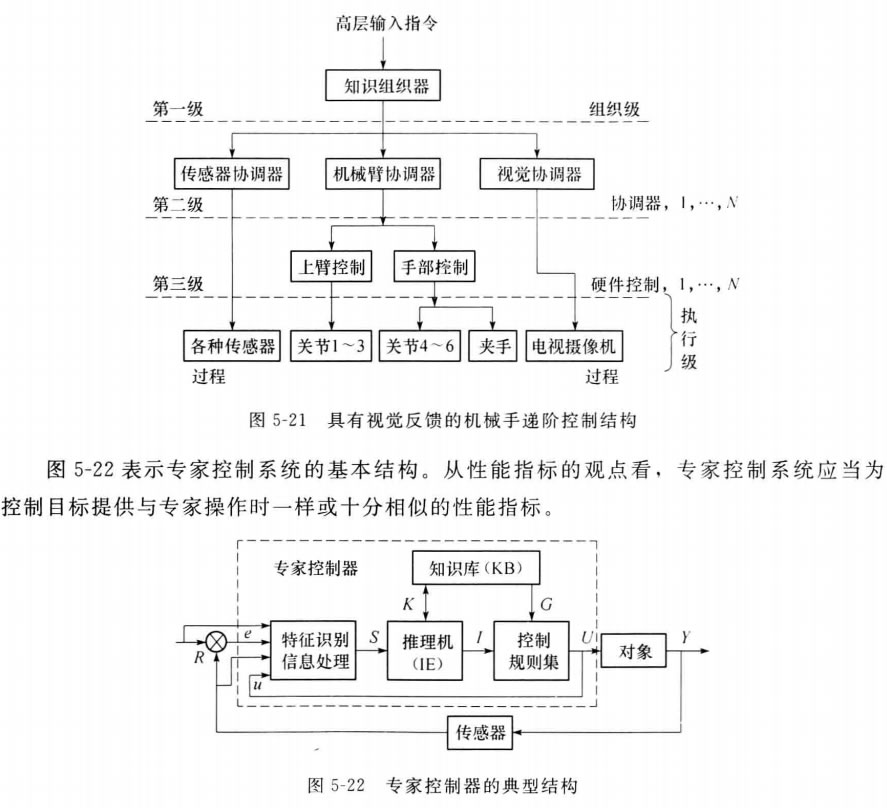
▒ŠīŻ╝ę┐žųŲŽĄĮy(t©»ng)×ķ ę╗ ╣żśI(y©©)īŻ╝ę┐žųŲŲ„(EC), ╦³ ė╔ ų¬ ūR(sh©¬) Äņ(k©┤) Īó ═Ų └Ē ÖC(j©®) Īó ┐ž ųŲ ęÄ(gu©®) ät ╝» ║═ ╠ž š„ūR(sh©¬)äeą┼Žó╠Ä└ĒĄ╚å╬į¬ĮM│╔ĪŻų¬ūR(sh©¬)Äņ(k©┤)ė├ė┌┤µĘ┼╣żśI(y©©)▀^(gu©░)│╠┐žųŲĄ─ŅI(l©½ng)ė“ų¬ūR(sh©¬)Ż╗═Ų└ĒÖC(j©®)ė├ė┌ėøæø╦∙▓╔ė├Ą─ęÄ(gu©®)ät║═┐žųŲ▓▀┬įŻ¼╩╣š¹éĆ(g©©)ŽĄĮy(t©»ng)ģf(xi©”)š{(di©żo)Ąž╣żū„Ż╗═Ų└ĒÖC(j©®)─▄ē“Ė∙ō■(j©┤)ų¬ūR(sh©¬)▀M(j©¼n)ąą═Ų└ĒŻ¼╦č╦„▓óī¦(d©Żo)│÷ĮY(ji©”)šōĪŻ
╠žš„ūR(sh©¬)äe┼cą┼Žó╠Ä└Ēå╬į¬Ą─ū„ė├╩ŪīŹ(sh©¬)¼F(xi©żn)ī”(du©¼)ą┼ŽóĄ─╠ß╚Ī┼c╝ė╣żŻ¼×ķ┐žųŲøQ▓▀║═īW(xu©”)┴Ģ(x©¬)▀mæ¬(y©®ng)╠ß ╣®ę└ō■(j©┤)ĪŻ╦³ų„ę¬░³└©│ķ╚Īäė(d©░ng)æB(t©żi)▀^(gu©░)│╠Ą─╠žš„ą┼ŽóŻ¼ūR(sh©¬)äeŽĄĮy(t©»ng)Ą─╠žš„ĀŅæB(t©żi)Ż¼▓óī”(du©¼)╠žš„ą┼Žóū÷▒žę¬ Ą─╝ė╣żĪŻ
EC Ą─ ▌ö ╚ļ ╝» ×ķE=(R,e,Y,U),S ×ķ ╠ž š„ ą┼ Žó ▌ö │÷ ╝» Ż¼K ×ķ Įø(j©®ng) “×(y©żn) ų¬ ūR(sh©¬) ╝» Ż¼G ×ķ ęÄ(gu©®) ät ą▐ Ė─ ├³ ┴Ņ Ż¼I ×ķ═Ų└ĒÖC(j©®)śŗ(g©░u)▌ö│÷╝»Ż¼ U ×ķ EC Ą─ ▌ö │÷ ╝» ĪŻ
EC Ą──Żą═┐╔ė├Ž┬╩Į▒Ē╩ŠŻ║
U=f(E,K,I) (5.85)
ųŪ ─▄ ╦Ń ūėf ×ķÄūéĆ(g©©)╦ŃūėĄ─Å═(f©┤)║Ž▀\(y©┤n)╦ŃŻ║
f=gĪżhĪżp
Ųõ ųą Ż¼g:EĪ·S;h:SĪ┴KĪ·I;p:IĪ┴GĪ·UĪŻ
gĪóhĪóp Š∙×ķųŪ─▄╦ŃūėŻ¼Ųõą╬╩Į×ķŻ║
IF A THEN B (5.86)
Ųõ ųą Ż¼A ×ķŪ░╠ߌl╝■Ż¼ B ×ķĮY(ji©”)šōĪŻ A ┼c B ų«ķgĄ─ĻP(gu©Īn)ŽĄ┐╔ęį░³└©ĮŌ╬÷▒Ē▀_(d©ó)╩ĮĪó─Ż║²ĻP(gu©Īn)ŽĄĪóę“ ╣¹ĻP(gu©Īn)ŽĄ║═Įø(j©®ng)“×(y©żn)ęÄ(gu©®)ätĄ╚ČÓĘNą╬╩ĮĪŻ B ▀Ć┐╔ęį╩Ūę╗éĆ(g©©)ūėęÄ(gu©®)ät╝»ĪŻ
 |
| ╔╠ė├ÖC(j©®)Ų„╚╦ Disinfection Robot š╣ÅdÖC(j©®)Ų„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖC(j©®)Ų„╚╦Ąū▒P ėŁ┘eÖC(j©®)Ų„╚╦ ęŲäė(d©░ng)ÖC(j©®)Ų„╚╦Ąū▒P ųvĮŌÖC(j©®)Ų„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖC(j©®)Ų„╚╦ ┤¾Ų┴ÖC(j©®)Ų„╚╦ ņF╗»Ž¹ČŠÖC(j©®)Ų„╚╦ Ę■äš(w©┤)ÖC(j©®)Ų„╚╦Ąū▒P ųŪ─▄╦═▓═ÖC(j©®)Ų„╚╦ ņF╗»Ž¹ČŠÖC(j©®) ÖC(j©®)Ų„╚╦OEM┤·╣żÅS Ž¹ČŠÖC(j©®)Ų„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖC(j©®)Ų„╚╦ łDĢ°^ÖC(j©®)Ų„╚╦ ī¦(d©Żo)ę²ÖC(j©®)Ų„╚╦ ęŲäė(d©░ng)Ž¹ČŠÖC(j©®)Ų„╚╦ ī¦(d©Żo)į\ÖC(j©®)Ų„╚╦ ėŁ┘eĮė┤²ÖC(j©®)Ų„╚╦ Ū░┼_(t©ói)ÖC(j©®)Ų„╚╦ ī¦(d©Żo)ė[ÖC(j©®)Ų„╚╦ ŠŲĄĻ╦═╬’ÖC(j©®)Ų„╚╦ įŲ█E┐Ų╝╝ØÖ(r©┤n)ÖC(j©®)Ų„╚╦ įŲ█EŠŲĄĻÖC(j©®)Ų„╚╦ ųŪ─▄ī¦(d©Żo)į\ÖC(j©®)Ų„╚╦ |