Å─ÖC(j©®)Ų„╚╦šZ(y©│)ę¶ūR(sh©¬)äeĄ─ļyęū│╠Č╚║═æ¬(y©®ng)ė├─┐Ą─üĒ(l©ói)šf(shu©Ł)Ż¼┐╔ęįīóšZ(y©│)ę¶ūR(sh©¬)äeĘų×ķā╔┤¾ ŅÉŻ¼╝┤╠žČ©╚╦Ą─šZ(y©│)ę¶ūR(sh©¬)äeŽĄĮy(t©»ng)║═ĘŪ╠žČ©╚╦Ą─šZ(y©│)ę¶ūR(sh©¬)äeŽĄĮy(t©»ng)ĪŻ
╦∙ų^╠žČ©╚╦šZ(y©│)ę¶ūR(sh©¬)äeŽĄĮy(t©»ng)╩ŪųĖŻ¼┼ąČ©šf(shu©Ł)įÆ╚╦Ą─┬Ģę¶╩Ū▓╗╩Ū╩┬Ž╚ųĖČ©Ą──Ū éĆ(g©©)╚╦Ż¼╗“š▀╩Ū▓╗╩Ū╩┬Ž╚ųĖČ©Ą─ę╗┤¾┼·╚╦ųąĄ──│ę╗éĆ(g©©)ĪŻŽ╚ę¬ėøæøę╗éĆ(g©©)╚╦╗“š▀ ÄūéĆ(g©©)╚╦Ą─šZ(y©│)ę¶╠žš„Ż¼Č°Ūę▒╗ųĖČ©Ą─╚╦Ą─ųvįÆā╚(n©©i)╚▌ę▓╩Ū╩┬Ž╚ęÄ(gu©®)Č©║├Ą─ėąŽ▐Č©Ą─ ÄūŠõįÆĪŻ
╠žČ©╚╦šZ(y©│)ę¶ūR(sh©¬)äeŻ¼Ž╚꬚ę│÷įÆ궥─Ų³c(di©Żn)║═ĮK³c(di©Żn)ĪŻīŹ(sh©¬)“×(y©żn)ūC├„Ż¼×ķ┴╦ūR(sh©¬)äe ░l(f©Ī)čį╚╦Ą─įÆŻ¼Ž╚꬚ę│÷šZ(y©│)궥─Ų³c(di©Żn)║═ĮK³c(di©Żn)ĪŻ×ķ┤╦Ż¼ŽĄĮy(t©»ng)▀Ćę¬─▄ē“▒Ż┴¶ę╗Č╬ ┬Ģ궹┼╠¢(h©żo)Ż¼«ö(d©Īng)░l(f©Ī)¼F(xi©żn)├„’@Ą─┬Ģ궹┼╠¢(h©żo)Ģr(sh©¬)Ż¼ę¬Å─▀@³c(di©Żn)Ž“Ū░┐╝▓ņĖ„éĆ(g©©)Č╠Ģr(sh©¬)ķgČ╬Ą─Ę∙Č╚┼c▀^(gu©░)┴ŃČ╚Ż¼ų╗ę¬Ųõųąų«ę╗│¼▀^(gu©░)─│éĆ(g©©)Ž▐ųĄŻ¼Š═šJ(r©©n)×ķ▀@Č╬▀Ć╩Ūī┘ė┌░l(f©Ī)ę¶Č╬Ż¼ų▒ ĄĮ▀@ā╔ĘN╠žš„Č╝Ą═ė┌Ž▐ųĄĢr(sh©¬)▓┼═Żų╣┐╝▓ņŻ¼▀@éĆ(g©©)Ģr(sh©¬)ķg³c(di©Żn)Š═╩ŪšZ(y©│)궥─Ų³c(di©Żn)ĪŻ
ī”(du©¼)ė┌ ĮK³c(di©Żn)Ż¼ę▓ė├ŽÓ═¼Ą─▐kĘ©üĒ(l©ói)┼ąäeĪŻ╠žČ©╚╦šZ(y©│)ę¶ūR(sh©¬)äeŽĄĮy(t©»ng)┼ąäeĄ─╗∙▒ŠĘĮĘ©╩ŪŻ║ Ž╚┤_Č©ūR(sh©¬)äeĘĮĘ©╦∙ė├Ą─╠žš„Ż¼Ųõ┤╬īóĮė╩šĄĮĄ─įÆę¶╠ß╚Ī╠žš„ŠžĻćŻ¼╚╗║¾┼c╩┬ Ž╚┤µā”(ch©│)į┌ŽĄĮy(t©»ng)ų«ā╚(n©©i)Ą─ś╦(bi©Īo)£╩(zh©│n)─Ż░ÕųąĄ─╠žš„ŠžĻćŽÓ▒╚▌^Ż¼ėŗ(j©¼)╦Ń╦³éāĄ─ŠÓļxĪŻ▀@éĆ(g©©) ŠÓļx┐╔ęįė├Ė„éĆ(g©©)ī”(du©¼)æ¬(y©®ng)Ą─╠žš„ųĄų«▓ŅĄ─ŲĮĘĮ║═üĒ(l©ói)Č©Č©┴xĪŻ
╚ń╣¹ŠÓļxąĪė┌─│éĆ(g©©) ųĄŻ¼ätŽĄĮy(t©»ng)šJ(r©©n)×ķįō░l(f©Ī)čį╚╦╩ŪųĖČ©Ą─░l(f©Ī)čį╚╦Ż¼▓ó┤_Č©╦∙šf(shu©Ł)Ą─įÆ╩Ū╩▓├┤ĪŻŲõ┤¾ų┬ ┴„│╠╚ńłD4-18╦∙╩ŠĪŻ
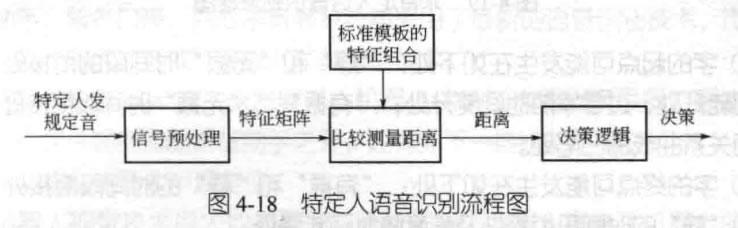
╠žČ©╚╦šZ(y©│)ę¶ūR(sh©¬)äeŽĄĮy(t©»ng)┼ąäeĄ─╗∙▒ŠĘĮĘ©╩ŪŻ║
ó┘┤_Č©ūR(sh©¬)äeĘĮĘ©╦∙ė├Ą─╠žš„Ż╗
ó┌īóĮė╩šĄĮĄ─įÆę¶╠ß╚Ī╠žš„ŠžĻćŻ╗
ó█┼c╩┬Ž╚┤µā”(ch©│)į┌ŽĄĮy(t©»ng)ų«ā╚(n©©i)Ą─ś╦(bi©Īo)£╩(zh©│n)─Ż░ÕųąĄ─╠žš„ŠžĻćŽÓ▒╚▌^Ż¼ėŗ(j©¼)╦Ń╦³éāĄ─ŠÓļxĪŻ▀@éĆ(g©©)ŠÓļx┐╔ęįė├Ė„éĆ(g©©)ī”(du©¼)æ¬(y©®ng)Ą─╠žš„ųĄų«▓ŅĄ─ŲĮĘĮ║═üĒ(l©ói)Č©┴xĪŻ
ó▄╚ń╣¹ŠÓļxąĪė┌─│éĆ(g©©)ųĄŻ¼ätŽĄĮy(t©»ng)šJ(r©©n)×ķįō░l(f©Ī)čį╚╦╩ŪųĖČ©Ą─░l(f©Ī)čį╚╦Ż¼▓ó┤_Č©╦∙šf(shu©Ł)Ą─įÆ╩Ū╩▓├┤ĪŻ
 |
| ╔╠ė├ÖC(j©®)Ų„╚╦ Disinfection Robot š╣ÅdÖC(j©®)Ų„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖC(j©®)Ų„╚╦Ąū▒P ėŁ┘eÖC(j©®)Ų„╚╦ ęŲäė(d©░ng)ÖC(j©®)Ų„╚╦Ąū▒P ųvĮŌÖC(j©®)Ų„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖC(j©®)Ų„╚╦ ┤¾Ų┴ÖC(j©®)Ų„╚╦ ņF╗»Ž¹ČŠÖC(j©®)Ų„╚╦ Ę■äš(w©┤)ÖC(j©®)Ų„╚╦Ąū▒P ųŪ─▄╦═▓═ÖC(j©®)Ų„╚╦ ņF╗»Ž¹ČŠÖC(j©®) ÖC(j©®)Ų„╚╦OEM┤·╣żÅS Ž¹ČŠÖC(j©®)Ų„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖC(j©®)Ų„╚╦ łDĢ°(sh©▒)^ÖC(j©®)Ų„╚╦ ī¦(d©Żo)ę²ÖC(j©®)Ų„╚╦ ęŲäė(d©░ng)Ž¹ČŠÖC(j©®)Ų„╚╦ ī¦(d©Żo)į\ÖC(j©®)Ų„╚╦ ėŁ┘eĮė┤²ÖC(j©®)Ų„╚╦ Ū░┼_(t©ói)ÖC(j©®)Ų„╚╦ ī¦(d©Żo)ė[ÖC(j©®)Ų„╚╦ ŠŲĄĻ╦═╬’ÖC(j©®)Ų„╚╦ įŲ█E┐Ų╝╝ØÖ(r©┤n)ÖC(j©®)Ų„╚╦ įŲ█EŠŲĄĻÖC(j©®)Ų„╚╦ ųŪ─▄ī¦(d©Żo)į\ÖC(j©®)Ų„╚╦ |